ODE第二次作业
习题 1
设 $c \in \mathbb{R}$,定义
$$ \varphi_c(t) := \frac{ce^t}{1 - c + ce^t}. $$
画出函数 $\varphi_c$ 的图像,并研究函数 $\varphi_c$ 的凸凹性。
解答
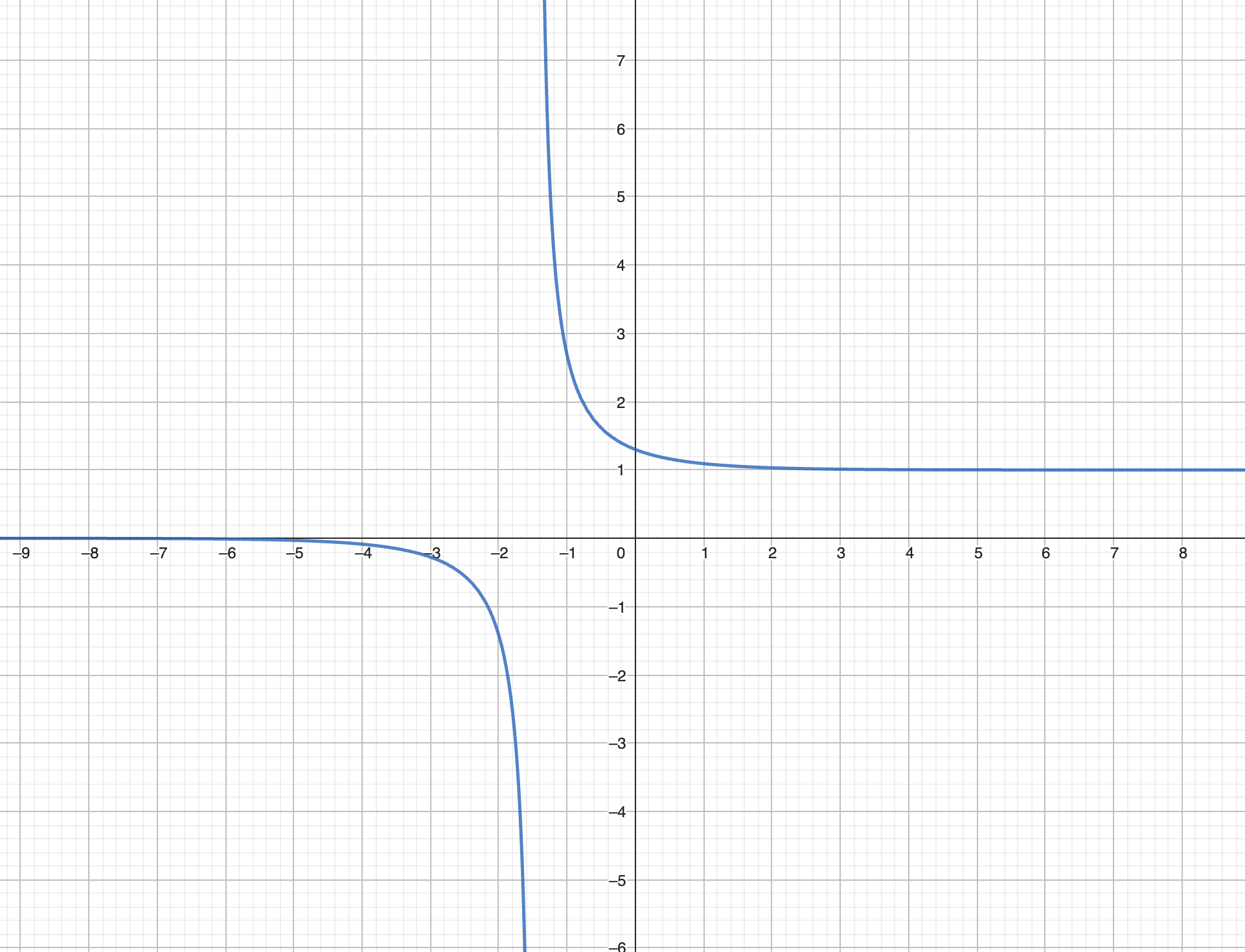


$$ \varphi_c'(t) = \frac{ce_t(1-c+ce^t)-c^2e^{2t}}{(1-c+ce^t)^2} = \frac{(1-c)ce^t}{(1-c+ce^t)^2} $$
$$ \varphi_c''(t) = \frac{(1-c)ce^t(1-c+ce^t)^2 - (1-c)ce^t \cdot 2(1-c+ce^t)ce^t}{(1-c+ce^t)^4}\\ = \frac{(1-c)ce^t(1-c)(1-c+ce^t)}{(1-c+ce^t)^4} = \frac{(1-c)^2ce^t}{(1-c+ce^t)^3} $$
$c<0$时,$\varphi_c''(t)<0$,$\varphi_c(t)$在$t\in(-\infty,+\infty)$上为凹函数。
$c>1$或$0
$c=0/1$时,$\varphi_c''(t)=0$,$\varphi_c(t)$在$t\in(-\infty,+\infty)$上为驻点。
习题 2
考虑 Logistic 系统 $\dot{x} = x(1 - x)$。
- 画出系统的方向场。
- 对 $c > 1, 0 < c < 1, c < 0$ 分别求解初值问题
$$ \dot{x} = x(1 - x); \quad x(0) = c. $$ - 根据解的表达式对方向场作出解释。
解答
1.

2.
分离变量:
$$ \frac{1}{x(1-x)}dx = dt \Rightarrow (\frac{1}{x}+\frac{1}{1-x})dx = dt \\ \Rightarrow \ln|x|-\ln|1-x|=t+C \Rightarrow \frac{x}{1-x}=Ce^t \Rightarrow x=\frac{Ce^t}{1+Ce^t} $$
带入初值$x(0)=c$:
$$ c=\frac{C}{1+C} \Rightarrow C=\frac{c}{1-c} \Rightarrow x(t)=\frac{\frac{c}{1-c}e^t}{1+\frac{c}{1-c}e^t}=\frac{ce^t}{1-c+ce^t} $$
3.
- 平衡点:$x=0$(不稳定),$x=1$(稳定)。
- 若 $c>0$:解单调趋于 $x=1$,方向场箭头指向 $x=1$($0
- 若 $c<0$:解单调递减趋向 $-\infty$,方向场箭头向下。
- 若 $c=0$ 或 $1$:解恒为平衡解。
根据方向场的箭头方向:所有正初值被吸引到 $x=1$,负初值发散,$x=0$ 为分界点。
习题 3
设 $p \geq 0$。考虑系统族
$$ \dot{x} = x(1 - x) - px. $$
画出这一族系统的相图分岔图,并对其分岔行为给出解释。
解答
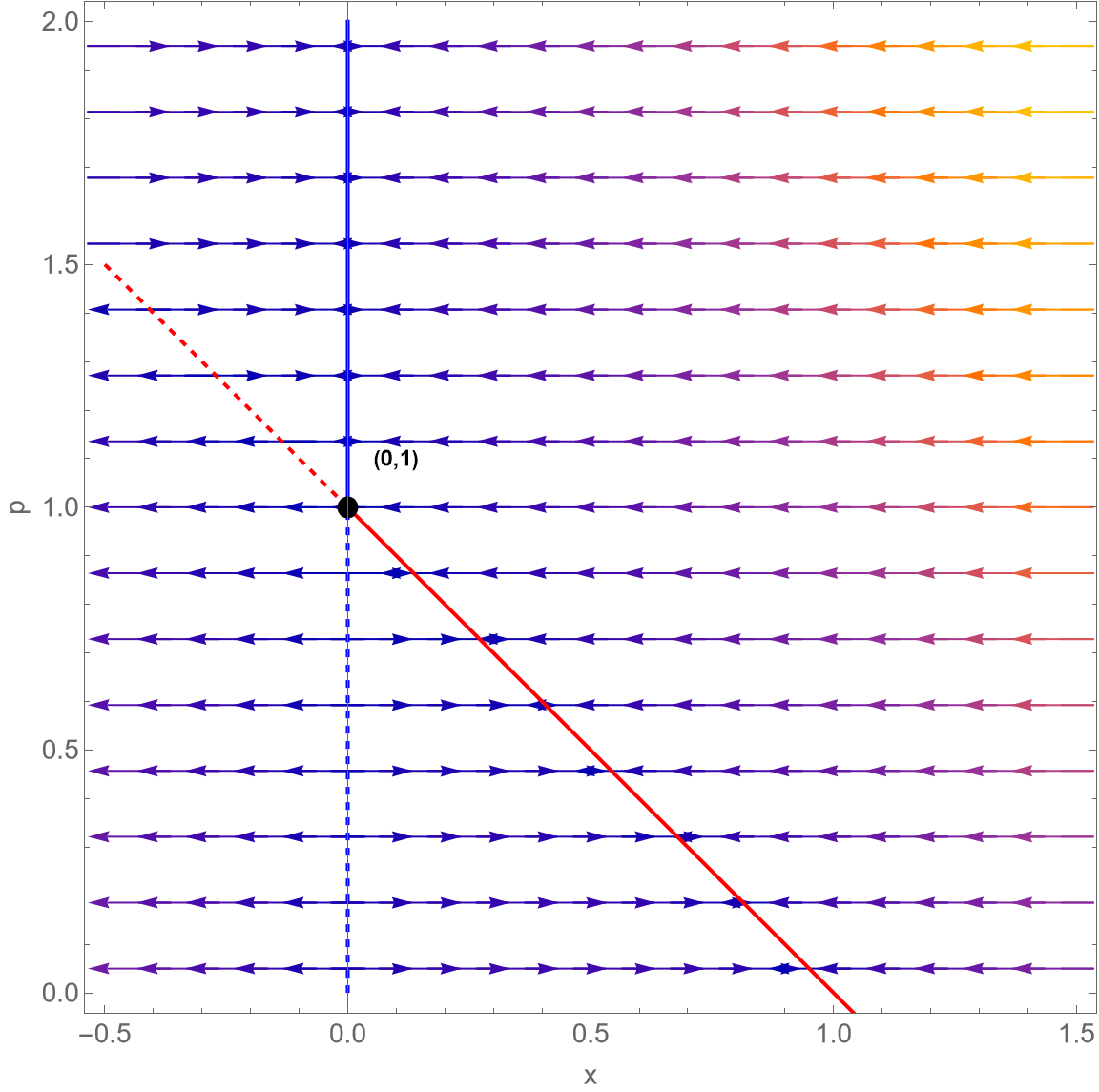
该系统发生在参数 $p = 1$ 处发生分岔:
- 两个平衡点 $x = 0$ 和 $x = 1 - p$ 相交;
- 它们在交点处交换稳定性:
- 当 $p < 1$:$x = 1 - p > 0$ 稳定,$x = 0$ 不稳定;
- 当 $p > 1$:$x = 0$ 稳定,$x = 1 - p < 0$ 不稳定。
分岔不产生或消灭平衡点,仅改变其稳定性。
习题 4
设 $a \in \mathbb{R}$。考虑系统族
$$ \dot{x} = x^3 - x + a. $$
画出这一族系统的相图分岔图,并对其分岔行为给出解释。
解答
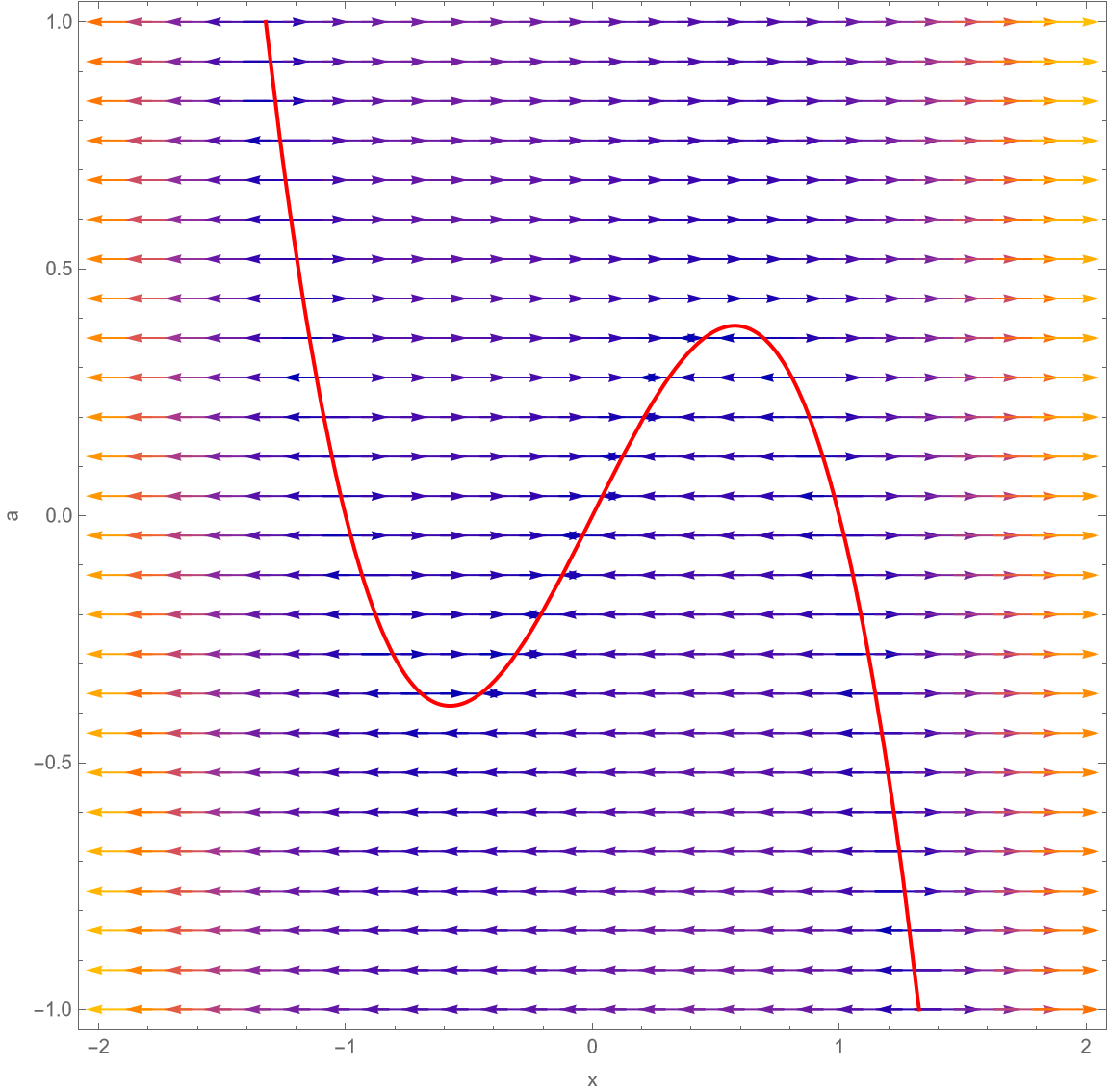
该系统在 $a = \pm \frac{2\sqrt{3}}{9}$ 处发生分岔:
- 当 $|a| < \frac{2\sqrt{3}}{9}$:系统有三个平衡点(稳定-不稳定-稳定交替,实际为 不稳-稳-不稳);
- 当 $|a| = \frac{2\sqrt{3}}{9}$:两个平衡点碰撞并湮灭(或产生);
- 当 $|a| > \frac{2\sqrt{3}}{9}$:仅剩一个不稳定平衡点。
因此,随着 $|a|$ 增大,系统从多稳态变为单稳态,经历平衡点对的产生/消失。
习题 5
考虑如下 3 个一阶二维系统
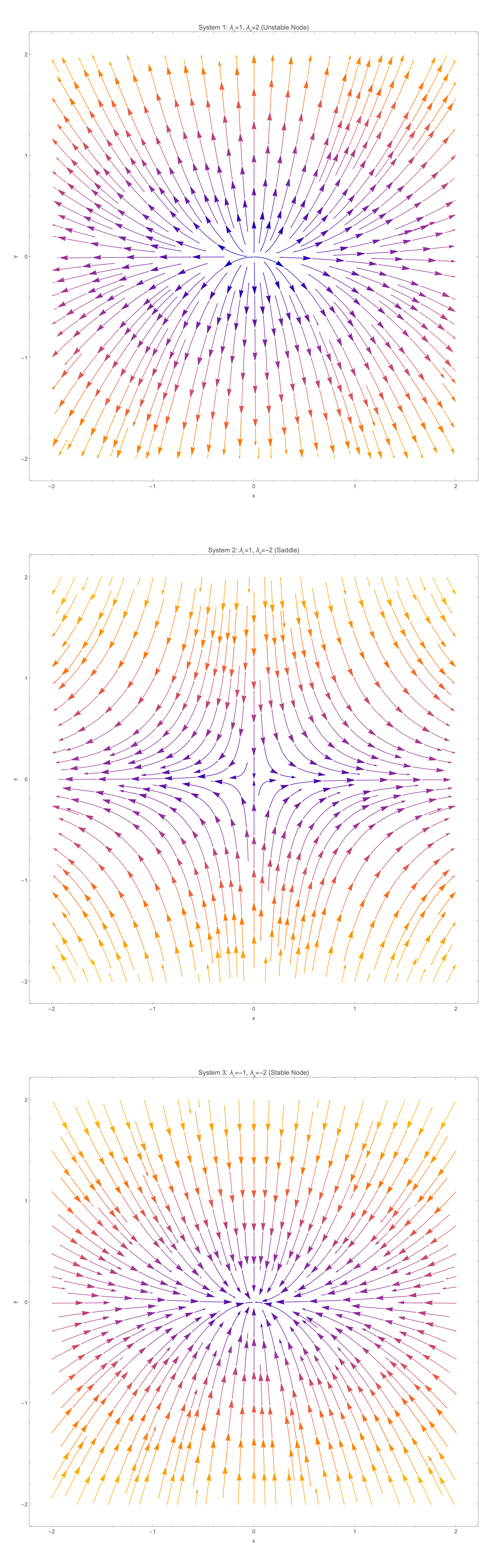
$$ \dot{X} = \begin{bmatrix} 1 & 0 \\ 0 & 2 \end{bmatrix} X; \quad \dot{X} = \begin{bmatrix} 1 & 0 \\ 0 & -2 \end{bmatrix} X; \quad \dot{X} = \begin{bmatrix} -1 & 0 \\ 0 & -2 \end{bmatrix} X. $$
- 分别画出三个系统的相图。
- 求解三个系统,并根据解的表达式对相图作出解释。
解答
1.
2.
-
System 1
$$ x = \frac{dx}{dt} \Rightarrow \frac{1}{x}dx = dt \Rightarrow \ln|x|=t+C_1 \Rightarrow x=C_1e^t $$
$$ y = 2\frac{dy}{dt} \Rightarrow \frac{1}{2y}dy = dt \Rightarrow \ln|y|/2=t+C_2 \Rightarrow y=C_2e^{2t} $$
$$ \Rightarrow X(t) = \begin{bmatrix}C_1e^t \\ C_2e^{2t}\end{bmatrix} $$ -
System 2
$$ x = \frac{dx}{dt} \Rightarrow \frac{1}{x}dx = dt \Rightarrow \ln|x|=t+C_1 \Rightarrow x=C_1e^t $$
$$ y = -2\frac{dy}{dt} \Rightarrow \frac{1}{-2y}dy = dt \Rightarrow \ln|y|/(-2)=t+C_2 \Rightarrow y=C_2e^{-2t} $$
$$\Rightarrow X(t) = \begin{bmatrix}C_1e^t \\ C_2e^{-2t}\end{bmatrix}$$
-
System 3
$$ x = -\frac{dx}{dt} \Rightarrow \frac{1}{-x}dx = dt \Rightarrow \ln|x|=-t+C_1 \Rightarrow x=C_1e^{-t} $$
$$ y = -2\frac{dy}{dt} \Rightarrow \frac{1}{-2y}dy = dt \Rightarrow \ln|y|/(-2)=t+C_2 \Rightarrow y=C_2e^{-2t} $$
$$\Rightarrow X(t) = \begin{bmatrix}C_1e^{-t} \\ C_2e^{-2t}\end{bmatrix}$$ -
系统 1:
$x(t)=x_0e^{t},\; y(t)=y_0e^{2t}$
→ 所有非零解远离原点,$y$ 增长更快。
相图:不稳定结点。 -
系统 2:
$x(t)=x_0e^{t},\; y(t)=y_0e^{-2t}$
→ 沿 $x$-轴发散,沿 $y$-轴收敛。
相图:鞍点($x$-轴为不稳定流形,$y$-轴为稳定流形)。 -
系统 3:
$x(t)=x_0e^{-t},\; y(t)=y_0e^{-2t}$
→ 所有解趋于原点,$y$ 衰减更快。
相图:稳定结点。
习题 6
考虑如下 2 个一阶二维系统
$$ \dot{X} = \begin{bmatrix} 1 & 1 \\ -2 & 1 \end{bmatrix} X; \quad \dot{X} = \begin{bmatrix} 1 & 1 \\ 2 & 1 \end{bmatrix} X. $$
- 分别画出 2 个系统的相图。
- 将系统转化为一个等价的二阶 ODE,假设其有形如 $\phi(t) = e^{\lambda t}$ 的解,并由此求解方程。
- 根据解的表达式对相图作出解释。
解答
1.
2.
$$ \begin{cases} \frac{dx}{dt} = y \\ \frac{dy}{dt} = -2x \end{cases} \Rightarrow \begin{cases} \frac{d^2x}{dt^2} = \frac{dy}{dt} = -2x \\ \frac{d^2y}{dt^2} = -2\frac{dx}{dt} = -2y \end{cases} $$
假设其有形如$x=e^{\lambda t}$的解,代入上式得:
$$ \lambda^2e^{\lambda t} = -2e^{\lambda t} \Rightarrow \lambda = \pm \sqrt{2}i $$
$$ \Rightarrow x = C_1\cos(\sqrt{2}t) + C_2\sin(\sqrt{2}t) $$
$$ y = \frac{dx}{dt} = -\sqrt{2}C_1\sin(\sqrt{2}t) + \sqrt{2}C_2\cos(\sqrt{2}t) $$
$$\Rightarrow X(t) = \begin{bmatrix} C_1\cos(\sqrt{2}t) + C_2\sin(\sqrt{2}t) \\ -\sqrt{2}C_1\sin(\sqrt{2}t) + \sqrt{2}C_2\cos(\sqrt{2}t) \end{bmatrix}$$
3.
-
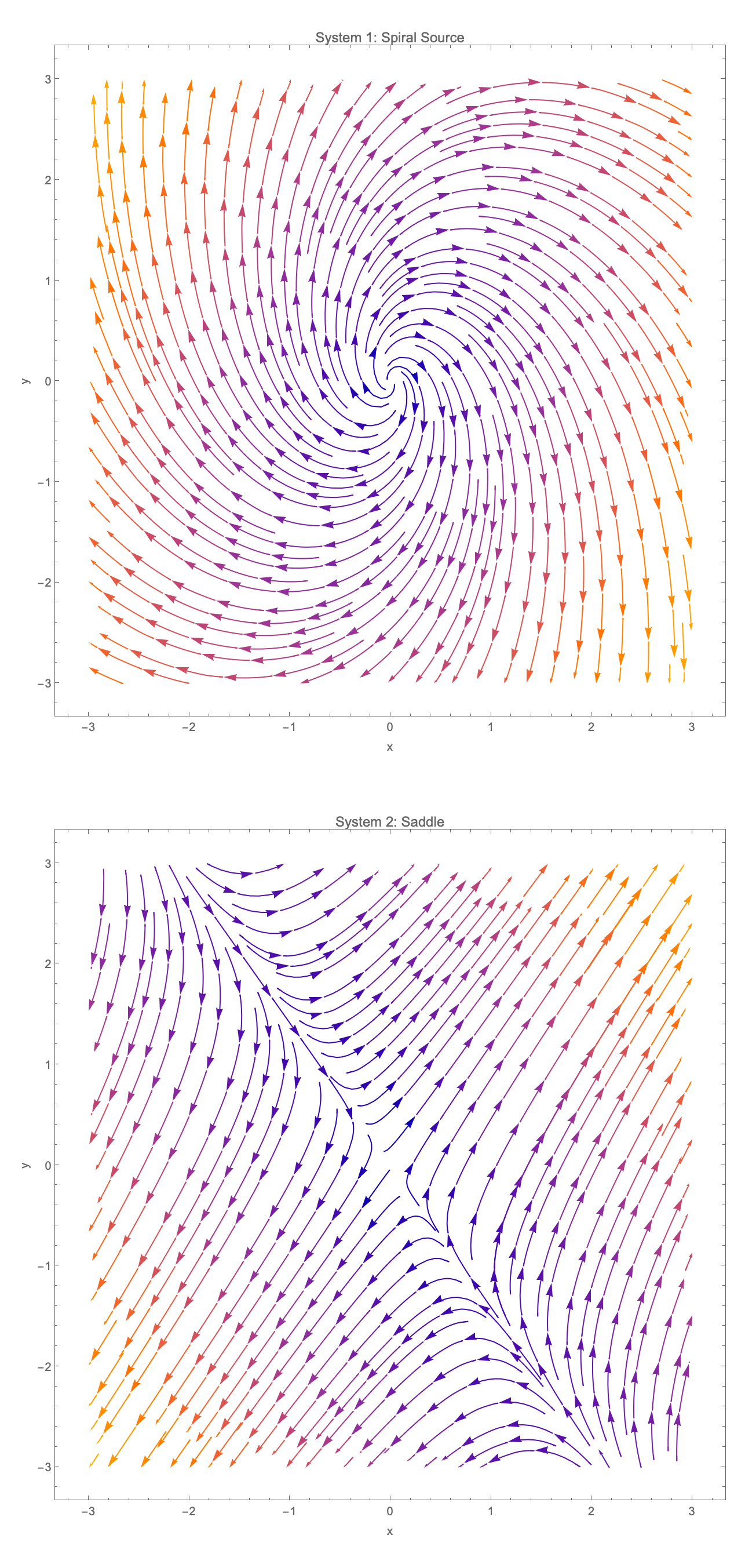
系统 1:
$x(t) = e^{t}(C_1\cos\sqrt{2}t + C_2\sin\sqrt{2}t)$
→ 解呈螺旋发散(实部 $>0$,复特征值)
相图:不稳定螺旋源。 -
系统 2:
$x(t) = C_1 e^{(1+\sqrt{2})t} + C_2 e^{(1-\sqrt{2})t}$
→ 一正一负实特征值
相图:鞍点(沿一个方向发散,另一方向收敛)。
习题 7
设 $\lambda \in \mathbb{R}$。考虑如下一阶二维系统
$$ \dot{X} = \begin{bmatrix} \lambda & 1 \\ 0 & \lambda \end{bmatrix} X. $$
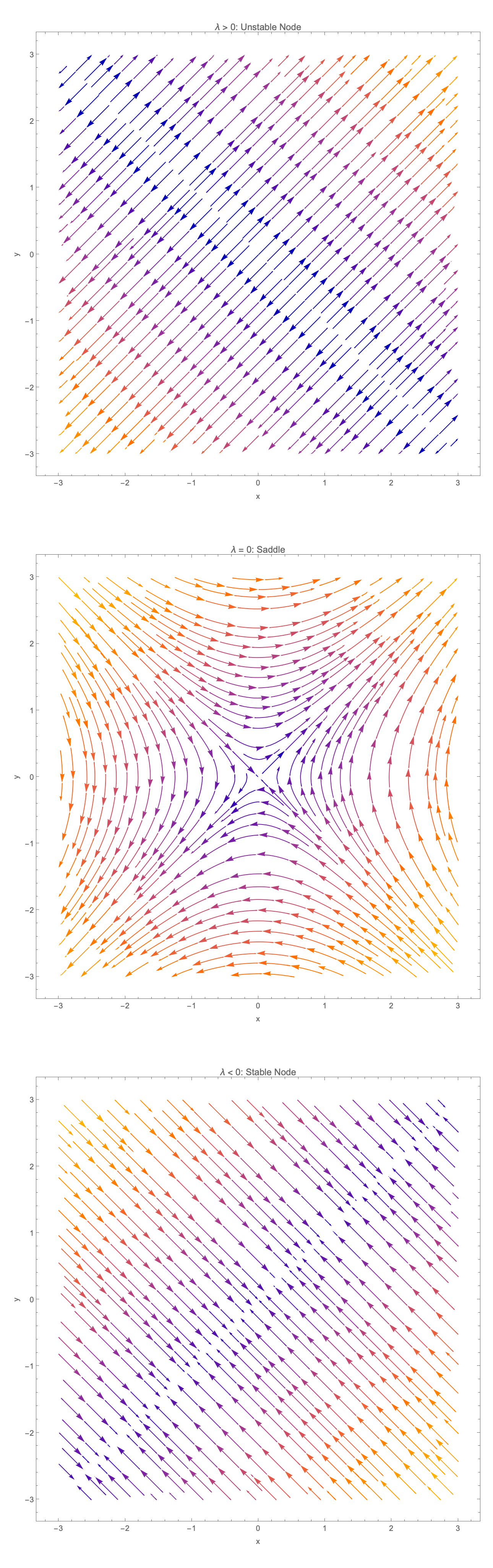
- 分 $\lambda > 0, \lambda = 0, \lambda < 0$ 画出系统的相图。
- 求解此方程(先求解 $y$ 分量,然后代入 $x$ 分量满足的方程,进而求解 $x$ 分量)。
- 根据解的表达式对相图作出解释。
解答
1.
2.
$$ \begin{cases} \frac{dx}{dt} = \lambda x+y \\ \frac{dy}{dt} = \lambda y \end{cases} $$
先求解$y$:
$$ \frac{dy}{dt} = \lambda y \Rightarrow \frac{1}{y}dy = \lambda dt \Rightarrow \ln|y|=\lambda t + C_1 \Rightarrow y=C_1e^{\lambda t} $$
再求解$x$:
$$ \frac{dx}{dt} = \lambda x + C_1e^{\lambda t} \Rightarrow \frac{dx}{dt} - \lambda x = C_1e^{\lambda t} $$
分离变量,先求解齐次方程:
$$ \frac{dx}{dt} = \lambda x \Rightarrow \frac{1}{x}dx = \lambda dt \Rightarrow \ln|x|=\lambda t + C_2 \Rightarrow x=C_2e^{\lambda t} $$
再求解非齐次方程,设$x=v(t)e^{\lambda t}$
$$ \frac{d(v(t)e^{\lambda t})}{dt} - \lambda v(t)e^{\lambda t} = C_1e^{\lambda t} \Rightarrow \frac{dv(t)}{dt}e^{\lambda t} = C_1e^{\lambda t} \Rightarrow \frac{dv(t)}{dt} = C_1 \Rightarrow v(t) = C_1t + C_3 $$
$$\Rightarrow x = (C_1t + C_3)e^{\lambda t}$$
$$\Rightarrow X(t) = \begin{bmatrix} (C_1t + C_3)e^{\lambda t} \\ C_1e^{\lambda t} \end{bmatrix}$$
3.
- λ > 0:特征值 > 0 → 所有轨迹远离原点 → 不稳定结点。
- λ = 0:特征值 ±1 → 鞍点。
- λ < 0:特征值 < 0 → 所有轨迹趋于原点 → 稳定结点。